摄像机模型与标定
参考:计算机视觉,鲁鹏,北京邮电大学。https://www.bilibili.com/video/BV1nz4y197Qv
课件:https://gitee.com/cv-xueba/A01_cvclass_basic
1 摄像机模型
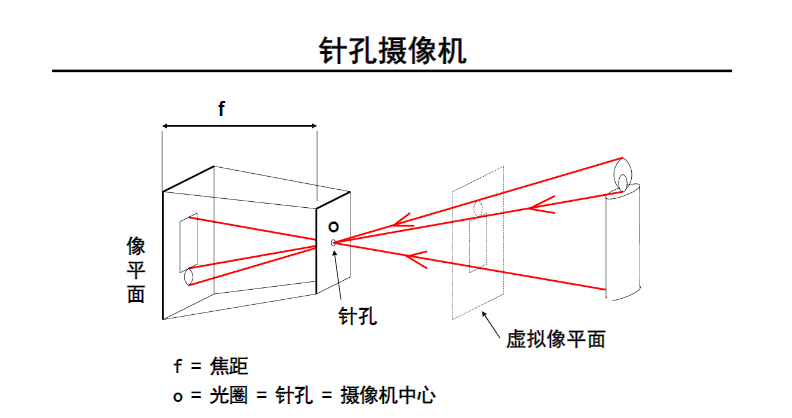
1.1 针孔模型
Q: 如果直接将胶片放置在物体前面,能否成像?不可以,胶片上的某个点汇集了现实世界中各个点的光线,形成的像是模糊的。
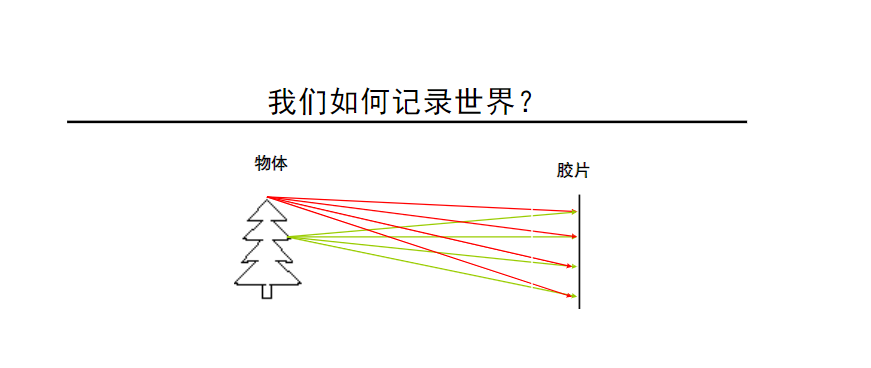
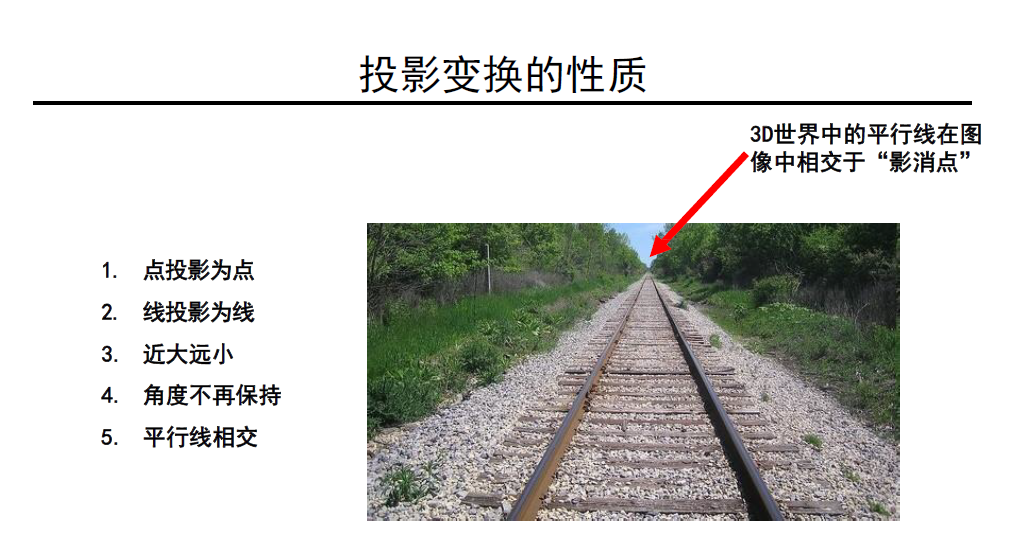
现实中我们发现了小孔成像原理,实现了三维世界到二维的映射。
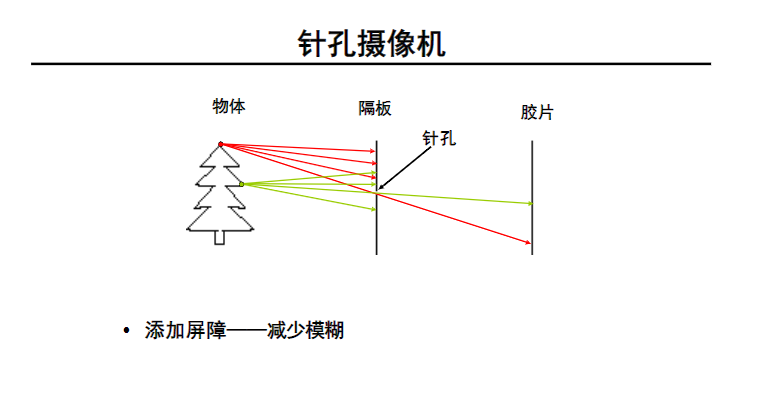
在摄像机中,光圈充当了小孔的作用。
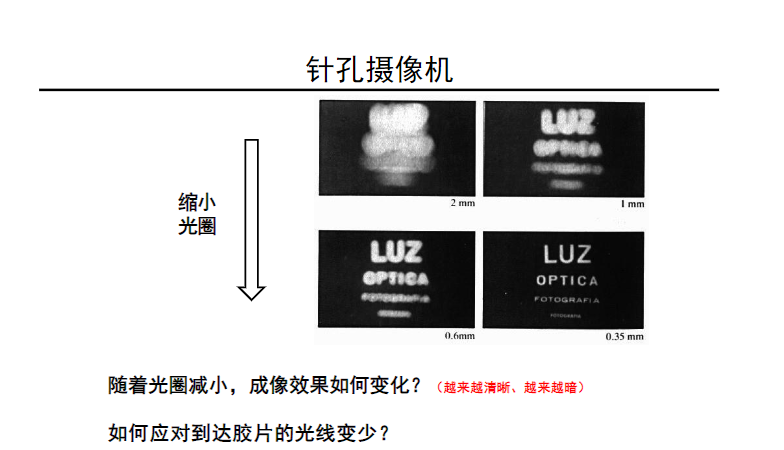
光圈的作用?:光圈越大,进光量越大,成像亮度越大,但是模糊;光圈越小,成像亮度越小,但是清晰。如何折衷?加透镜,聚光!
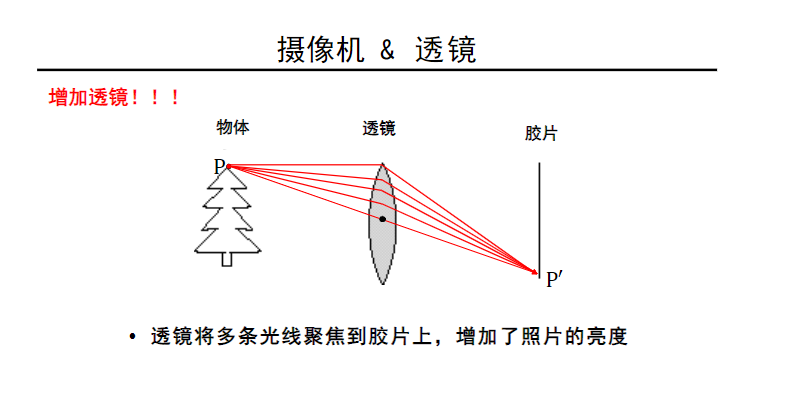
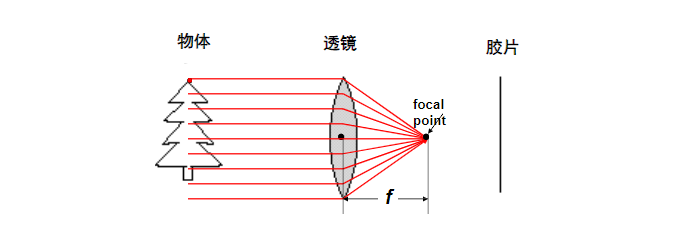
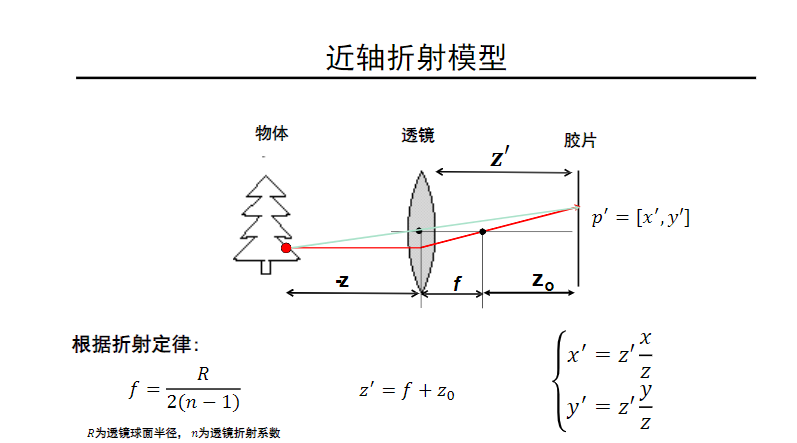
透镜将多条光线聚焦到胶片上,增加了照片的亮度;所有平行于光轴的光线都会会聚到焦点,焦点到透镜中心的距离称为焦距;穿过透镜中心(光心)的光线的传播方向不发生改变。
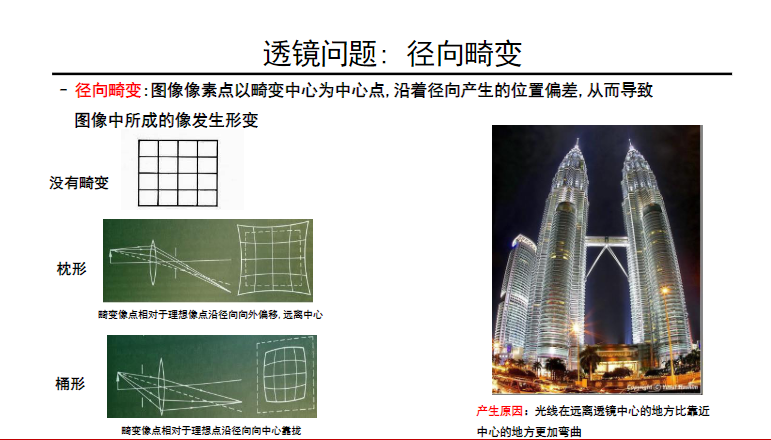
透镜存在问题:当像距(景深)不合适的话会失焦、径向畸变。
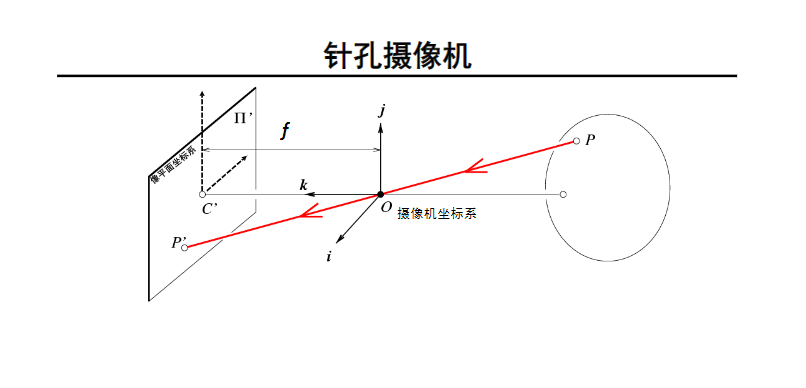
1.2 摄像机几何
本节要介绍的坐标系:摄像机坐标系、像平面坐标系、像素坐标系、世界坐标系,齐次坐标。
1.2.1 摄像机坐标系和像平面之间的坐标变换关系
加了透镜之后的相机模型:
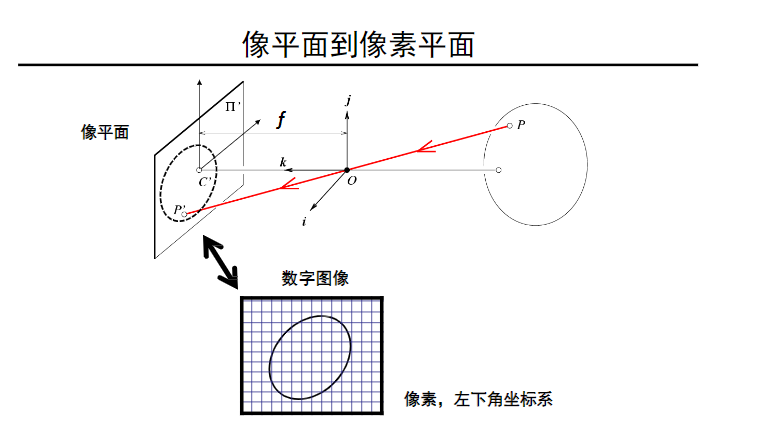
1.2.2 像平面坐标系和像素坐标系之间的变换关系
在像平面坐标系中,原点是在中心点($C^\prime $);而在像素平面中,一般以左下角为原点。因此,从像平面坐标系到像素平面有$x,y$方向上的两个偏置$c_x,c_y$。
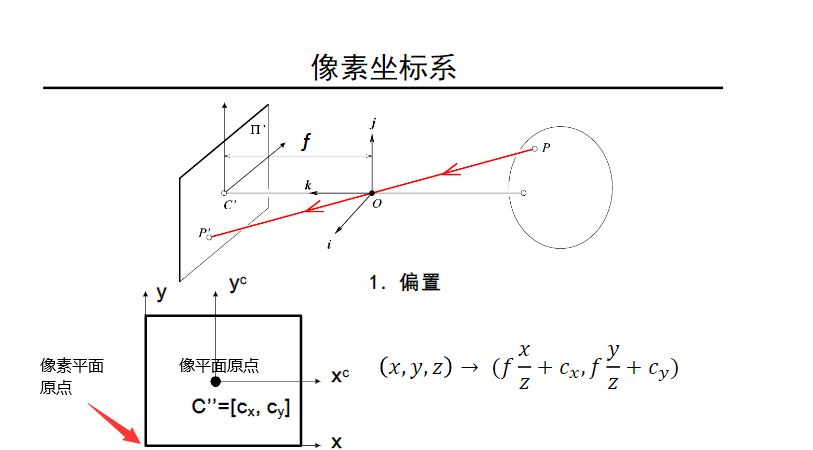
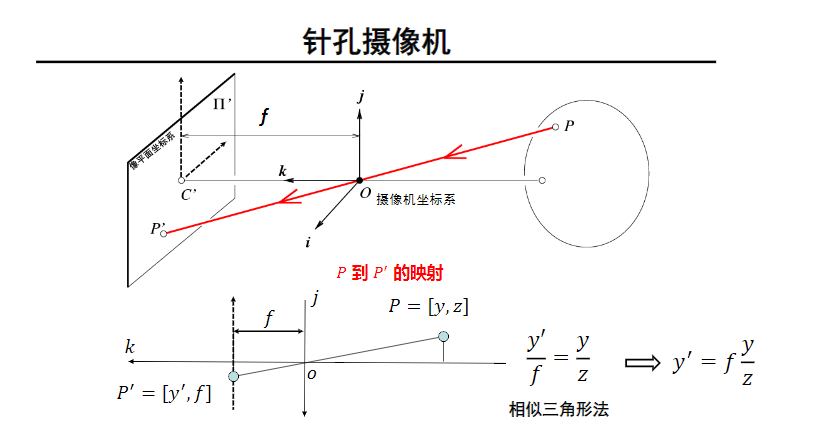
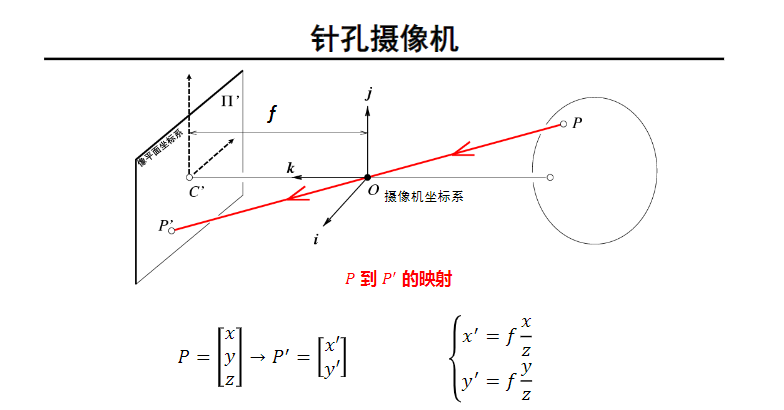
上图中我们可以看出,在摄像机坐标系平面中的点$(x,y,z)$在像平面中的坐标是$(f\frac{x}{z},f\frac{y}{z})$,在像素平面中,像平面原点坐标是$(c_x,c_y)$,因此摄像机坐标系的点到像素坐标系坐标变换为:$(f\frac{x}{z} + c_x,f\frac{y}{z}+c_y)$。
但还有一个问题是,$x,y$都是现实世界中的点,单位都是米/厘米等($m/cm$)我们想转换为像素单位($pixel$)。这就涉及到相机成像元器件(CCD/CMOS等)的分辨率 $k,l$ (垂直方向、水平方向各向异性)决定了一个像素可以代表现实世界中多少距离。
因此,有单位变换:
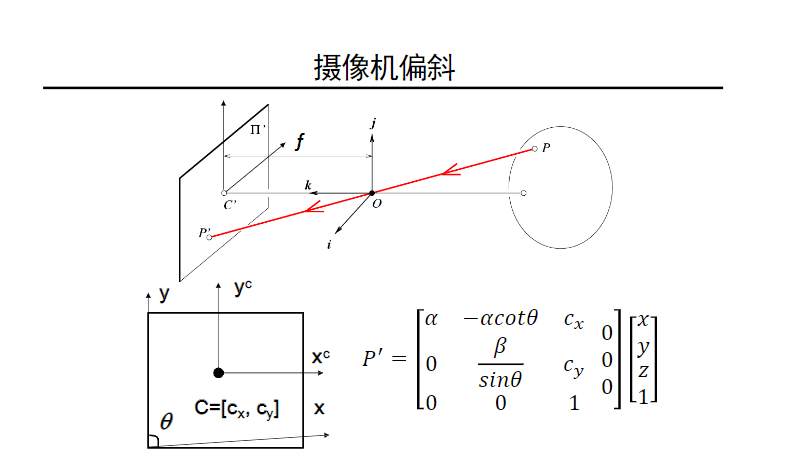
$f$ 的单位是$m$,那么$k,l$ 的单位是$pixel/m$,令$\alpha = fk,\beta = fl$,有:
$P^\prime$ 的单位就是像素了,表示像素平面坐标中的点。
注意:这个变换不是线性的($z$ 是变换的)。
1.2.3 摄像机坐标系和像素平面坐标系之间的关系
我们想把这个变换表示为线性形式,这时就需要引入齐次坐标。齐次坐标就是将一个原本是 $n$ 维的向量用一个 $n+1$ 维向量来表示。二维笛卡尔坐标系的点 $(x,y)$ 变换到齐次坐标就是 $(x,y,1)$;而齐次坐标系中的点 $(x,y,z)$变换到二维笛卡尔坐标中就是 $(x/z,y/z)$,$(x,y,z,w)\rightarrow (x/w,y/w,z/w)$。
齐次坐标系中的投影变换
引入齐次坐标后,把$P=(x,y,z)$表示为齐次坐标,即$P_h=(x,y,z,1)$,通过下面变换
欧式点$(\alpha\frac{x}{z},\beta\frac{y}{z})$变换到齐次坐标对应$\begin{pmatrix}\alpha x + c_xz\\\beta x + c_yz\\z\end{pmatrix}$(同除 $z$ 就变回去了),有了上式中的投影矩阵,可以直接进行变换并且是线性的。
称 $M$ 即投影矩阵。考虑倾角$\theta$,
$M$ 就变成了:
这就是摄像机世界和像素平面的映射关系。
K为被称为摄像机内参数矩阵,内参数决定了摄像机坐标系下空间点到图像点的映射。
注意:上面是在齐次坐标下的表示。
1.2.4 世界坐标系与摄像机坐标系之间的关系
齐次坐标表示:
$R_{3\times3}$表示三维空间的旋转矩阵,$T_{3\times1}$表示三维空间平移向量。$P_w=(x_w,y_w,z_w,1)$表示世界坐标系下的点,$P$表示摄像机坐标系下的点。
1.2.5 世界坐标系与像素平面坐标系变换
上面就是世界坐标系下的点到像素平面坐标系的变换,最后的$P^\prime_{3\times1}$是像素点的齐次坐标向量。与摄像机内参矩阵相对应,我们称$\begin{pmatrix}R&T\\0&1 \end{pmatrix}$为外参数矩阵。
Q:投影矩阵$M$有多少个自由度(参数)? A:$R$ 有三个自由度,$T$ 有三个自由度,$K$ 有五个自由度,因此$M$ 有十一个自由度。
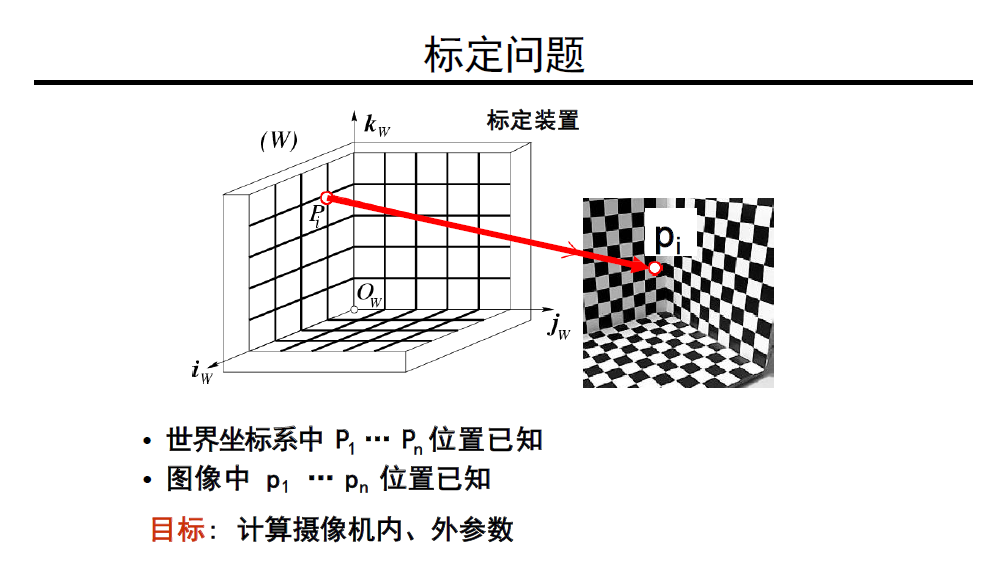
2 摄像机的标定
任务:给定图像数据集,求解摄像机的内参数。
重要性:摄像机内、外参数描述了三维世界到二素的映射关系。
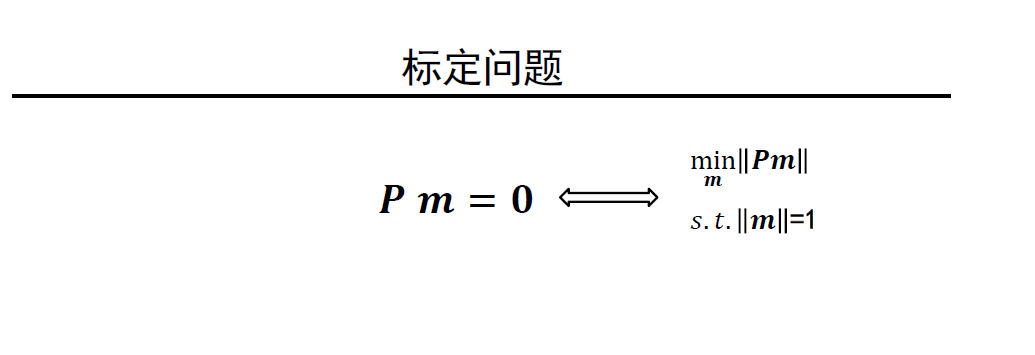
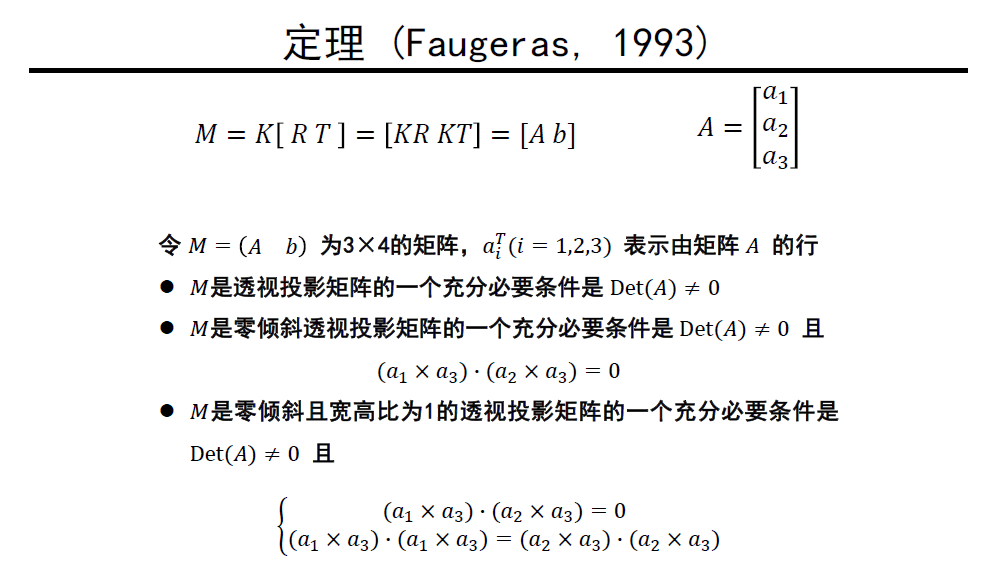
像素平面的点非齐次坐标$p = \begin{pmatrix}u\\v\end{pmatrix}$,世界坐标系中的点齐次坐标$P=\begin{pmatrix}x\\y\\z\\1\end{pmatrix}$,投影矩阵$M=\begin{pmatrix}\pmb m_1\\\pmb m_2\\\pmb m_3\end{pmatrix}$,可知 $\pmb m$ 是$1\times 4$的行向量。因此有:
注意$p^\prime$是齐次坐标形式,因此有:
在实际标定中,每一个点的$u,v,P$我们都是可以知道的,那么求解的未知量就只剩下了$\pmb m_1,\pmb m_2,\pmb m_3$这三个向量(共包含11个未知量)。
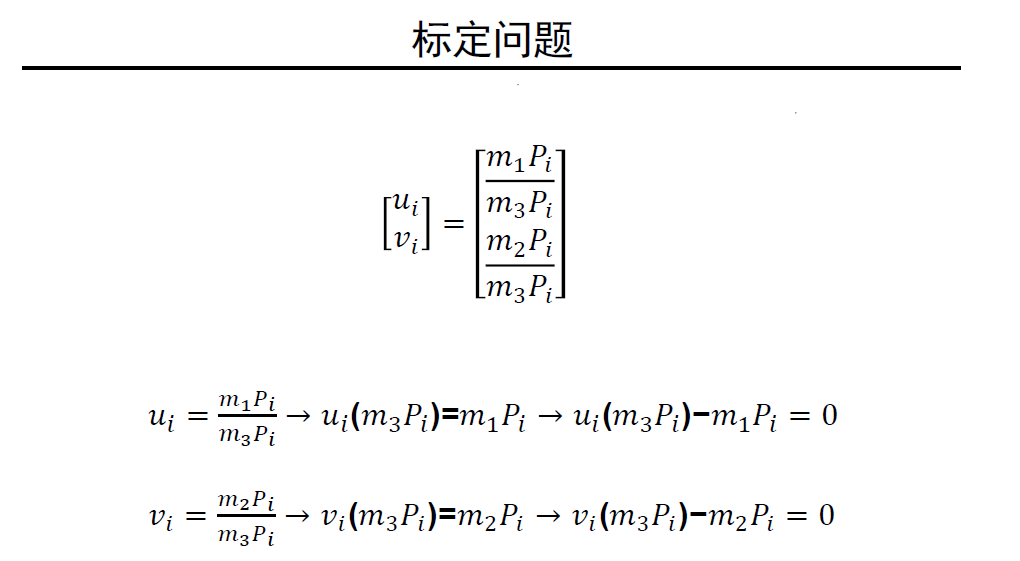
也就是说给定一个点,就可以得到两个方程。
进而:
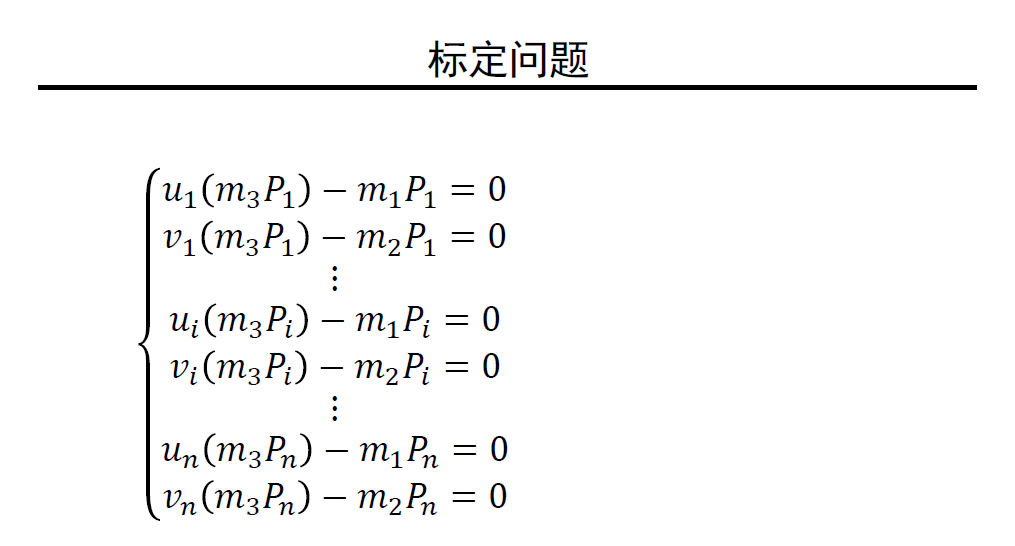
由于有11个未知量,因此至少采用大于6个点(组成12个方程)才可以求解方程组。
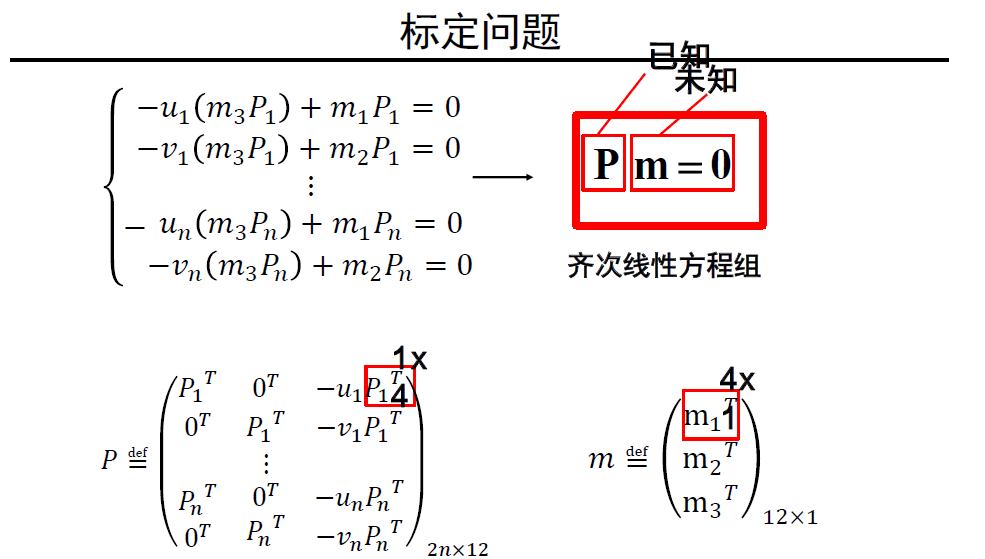
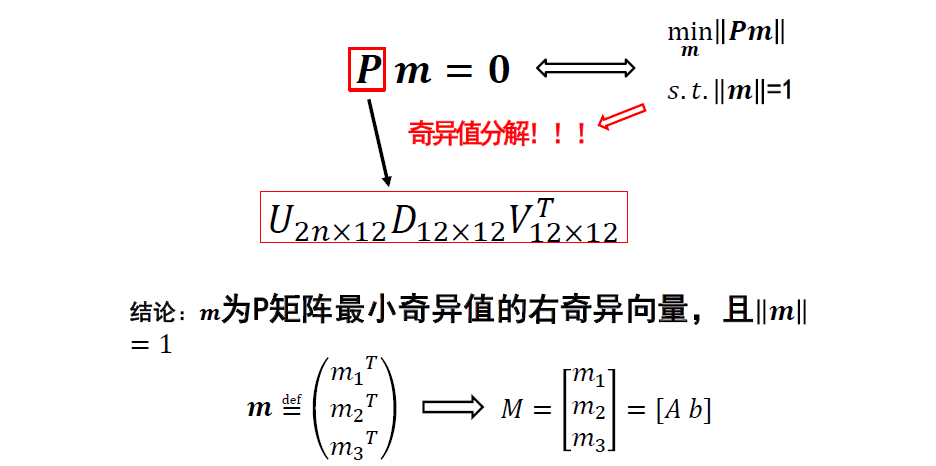
这时就可以利用最小二乘的方法来求解$\pmb m$。