Lecture 3 局部特征
1. Harris角点检测
1.1 特征点需要满足的性质
可重复性/区分性/容易计算
为什么选角点?
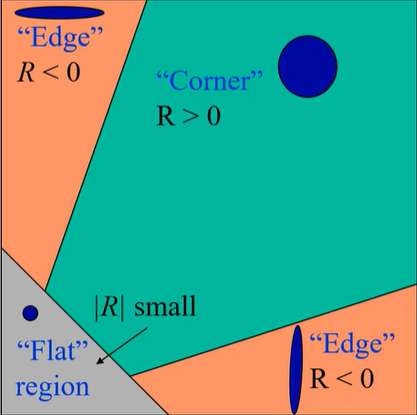
一个窗口在图像上滑动,处于平坦(flat)区域时,窗口内的内容不会发生明显改变;处于边缘(edge)区域时,只有沿一个方向(竖直或水平)滑动会发生变化;而处于角点(corner)区域时,沿两个方向滑动窗口内容都会发生改变。
1.2 角点
说明:$x,y$的取值范围是窗口的范围;$w(x,y)$指权值函数,比如$Gaussian$函数,本质上取到一个加权的作用。$u,v$即平移的距离。$E(u,v)$表示窗口内容变化程度。
我们希望直接观察到$u,v$和$E(u,v)$之间的关系,而上式定义较麻烦不直观(还得通过$I(x,y)$),怎么直接建立关系呢?答案:二维泰勒展开!
将(0,0)带入:得:$E_u(0,0) = 0$;同理可得$E_v(0,0)=0$;
为了表示方便,令:$I(x+u,y+v)$简写为$I$,$I_x(x+u,y+v)$简写为$I_x$等
带(0,0)有:
即:
$I_x,I_y$即上一个Lecture讲过的图像上定义的梯度(同方向相邻两个像素的差值)。$M$被称为second moment matrix。它是一个对称正定矩阵,因此可以对角化为特征值组成的对角矩阵。
考虑:
可知$E(u,v)$在几何上是一个椭圆。其轴分别为$1/\sqrt\lambda_1,1/\sqrt\lambda_2$。
$\lambda_1,\lambda_2$表示窗口内的$x,y$方向的图像梯度。当两个方向变化都很大时可能为角点。
优点:对光照、亮度不敏感
缺点:对尺度(scale)变换敏感!
2. Blob Detection
3. SIFT
SIFT即尺度不变特征变换。光照、尺度、旋转、平移。
添加仿射自适应:更好的处理视角
观察dog图像和log图像发现他俩走势几乎一致,可以用dog来代替log提高计算效率
sift $4 \times 4 \times 8=128$ 维描述子,sift算法将邻域内像素划分为 $16×16$ 个子域,进一步将其划分为 $4×4$ 块(每个块又是由 $4×4$ 小域组成),具体见下,分别计算每个块内8个方向的梯度方向直方图。所以最终得到 $4×4×8=128$ 4×4×8=128 的描述子向量。
梯度强度直方图:将$[0,2\pi]$划分为8份,也就是说$[0,\frac{\pi}{4}],[\frac{\pi}{4},\frac{\pi}{2}],…,[\frac{7\pi}{4},2\pi]$。然后在这些小区域(16个像素)的范围内,根据每个像素点的梯度方向所在范围,将该像素点的梯度幅值加到对应的bin上,最后就形成了小区域一个梯度强度直方图(8个数字描述)。16个小区域的整体特征就可以用这个$4 \times 4 \times 8$的特征向量来描述。

在小区域上(16个像素)统计梯度幅值直方图能更好的捕捉局部特征。